-
 Startseite
Startseite
-
 Projekt-Wiki
Projekt-Wiki
-
Projekt
-
Next Gen.
-
 YouTube
YouTube
-
 Java API-Doc
Java API-Doc
-
 C++ API-Doc
C++ API-Doc
-
 Steffen A. Mork
Steffen A. Mork
-
MORKNet-Blog
-
Impressum
-
Datenschutz
Alle Einträge
Schlagwörter:
Neue Bootloader geflasht
Kommandoverarbeitung wird modellbasiert generiert
Formsignale funktionieren auch
Prototypen für Magnetartikel-Module fertiggestellt
Prototypen für Lichtsignal-Module fertiggestellt
Schaltung für Steuerung über CAN-Bus steht
Neue Bootloader geflasht
Heute wurden einige Änderungen am CAN-Bus-Protokoll eingeführt. Die Broadcast-ID und die Gateway-ID wurden ausgetauscht. Dadurch haben Antworten der CAN-Knoten höhere Priorität auf dem Bus als alle anderen CAN-Meldungen. Gleichzeitig wurde die Antwortmeldung um zwei Bytes gekürzt. Diese Änderung machte das Umflashen der sämtlicher Bootlader und neue Gateway-Firmware notwendig.
Das war eine typische Unter-Tisch-Arbeit mit viel Kletterei. Wie es bei Murfy so ist, hat es nicht auf Anhieb geklappt. Die Ursache habe ich zwei Stunden später herausgefunden: Ich habe beim Flashen einen CAN-Knoten übersehen. Da er noch das alte Protokoll sprach, hat er den Flashvorgang der neuen Firmware gestört.
Zum guten Schluss hat alles geklappt und die neuen Bootlader erfüllen wieder ihren Zweck. Ein paar kleinere Probleme in der Steuerungs-Software waren schnell gefunden und behoben. Hier zeigt sich der Vorteil des automatischen Testens. Diese Tests sind fehlgeschlagen, weil über hart verdrahtete Indizes in der Antwortmeldung zugegriffen wurde. So konnte der Fehler vor Inbetriebnahme gefunden werden.
Kommandoverarbeitung wird modellbasiert generiert
 Die Kommandoverarbeitung in der Firmware der CAN-Knoten war ein unschönes
Stück Spaghetti-Code. Es dient trotzdem als Referenzimplementierung für
die modellbasierte Firmware-Entwicklung. Zuerst wurde ein Zustandsdiagramm
gefertigt, das die Betriebszustände enthält. Die eingehenden Kommandos sind
die Zustandsübergänge enthalten. Aus diesem Diagramm wird mit Hilfe von
openArchitectureWare
der Code für die Kommandoauswertung generiert. Der Code enthält relativ
viele Callbacks und switch/case-Anweisungen und bläht den Binärcode um ca.
1,5 KByte auf. Das ist aber nicht weiter schlimm, da jetzt noch Platz für
ca. 18 KByte im Flash des ATmega32 vorhanden ist.
Die Kommandoverarbeitung in der Firmware der CAN-Knoten war ein unschönes
Stück Spaghetti-Code. Es dient trotzdem als Referenzimplementierung für
die modellbasierte Firmware-Entwicklung. Zuerst wurde ein Zustandsdiagramm
gefertigt, das die Betriebszustände enthält. Die eingehenden Kommandos sind
die Zustandsübergänge enthalten. Aus diesem Diagramm wird mit Hilfe von
openArchitectureWare
der Code für die Kommandoauswertung generiert. Der Code enthält relativ
viele Callbacks und switch/case-Anweisungen und bläht den Binärcode um ca.
1,5 KByte auf. Das ist aber nicht weiter schlimm, da jetzt noch Platz für
ca. 18 KByte im Flash des ATmega32 vorhanden ist.
Formsignale funktionieren auch
 Heute habe ich einen üblen Fehler in der Firmware der Microcontroller
gefunden. Diese haben die Konfiguration der Formsignale zerschossen und
dadurch die Ansteuerung unbrauchbar gemacht. Hier zeigt sich die Stärke, den
Microcontrollern einen CAN-Bootloader zu verpassen. So können alle 14
verbauten Controller in einem Rutsch mit fehlerfreier Firmware geflasht
werden.
Heute habe ich einen üblen Fehler in der Firmware der Microcontroller
gefunden. Diese haben die Konfiguration der Formsignale zerschossen und
dadurch die Ansteuerung unbrauchbar gemacht. Hier zeigt sich die Stärke, den
Microcontrollern einen CAN-Bootloader zu verpassen. So können alle 14
verbauten Controller in einem Rutsch mit fehlerfreier Firmware geflasht
werden.
Behebung der Restprobleme
Die problembehafteten BRAWA-Signale sind nun auch in Ordnung gebracht. Ein Blocksignal scheint eine durchgebrannte Glühbirne zu haben. Diese kann aus einen Einfahrsignal mit unnützerweise zwei roten Glühbirnchen repariert werden. Auch ein Weichenantrieb scheint nicht durchzuschalten. Dieser muss vermutlich neu gekauft werden, denn die Ansteuerung des Schattenbahnhofs gelingt so nur von einer Seite.
Es sind noch einige andere Restarbeiten zu erledigen. Jetzt ist unter Eisenbahnanlage richtig Platz, so dass mal richtig gesaugt werden kann. Die Kabel der Weichen und Signale wurden nicht gekürzt. Sie werden zu Schleifen gebunden und mit dem Elektrotacker fixiert. Einige wenige Anschlüsse müssen noch beschriftet werden. 90 Prozent dieser Arbeit wurde schon vor der Verkabelung erledigt. Dies hat sich während der Verkabelung als sehr nützlich erwiesen, so dass die Konfiguration der Microcontroller sehr einfach von statten ging.
Prototypen für Magnetartikel-Module fertiggestellt
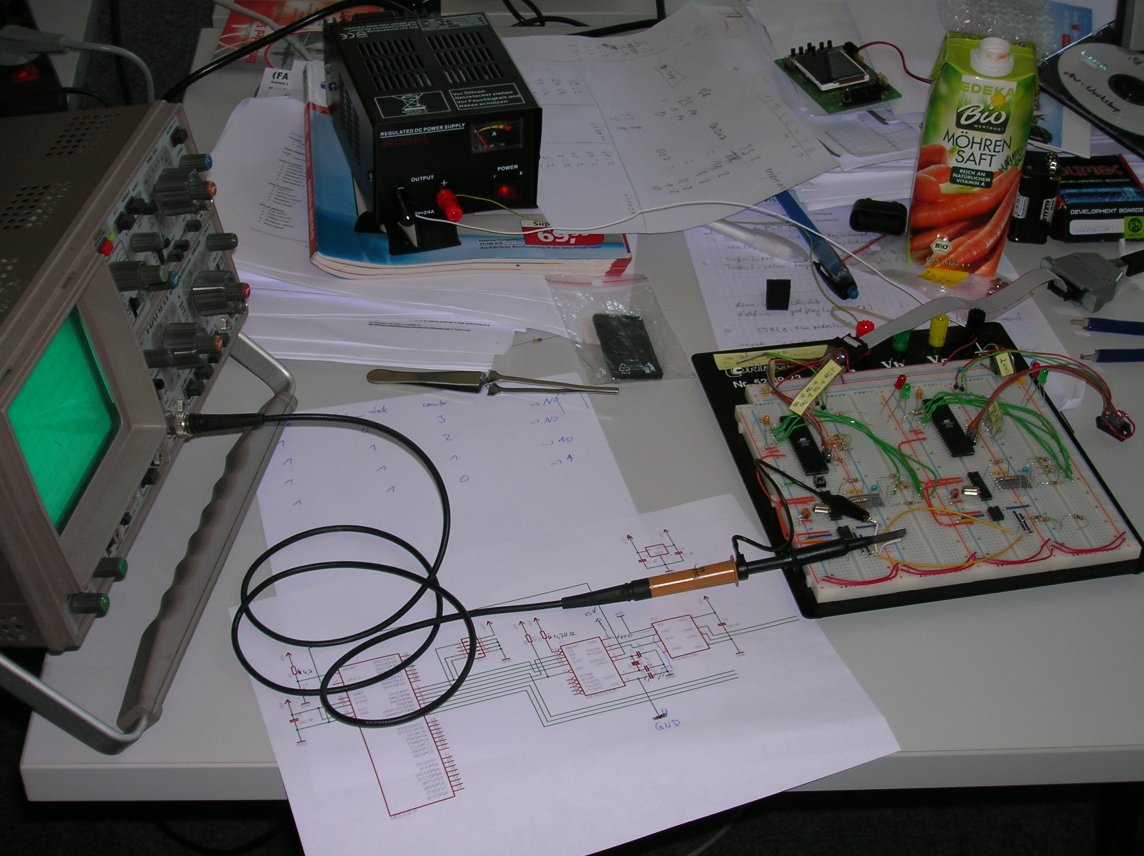
 Ähnlich einfach, wie die Entwicklung der Lichtsignal-Module gestaltete sich
heute der Prototyp für die Weichenschaltung. Nachdem auf dem Steckbrett eine
funktionierende Schaltung zusammengesteckt war, wurde ein Prototyp gelötet.
Einige Anpassungen in der CAN-Knoten-Firmware waren notwendig, damit die
Weichen oder Signale geschaltet werden können. Typische Modellweichen werden über
Magnetspulen angetrieben. Diese haben heutzutage eine Endabschaltung, um das
Durchbrennen der Magnetspulen durch Fehlbedienung zu verhindern. Diese
Endabschaltung lässt sich dazu ausnutzen, um die Lage der Weiche
festzustellen. So lassen sich manuelle Schaltvorgänge feststellen und es
lässt sich ein automatischer Schaltvorgang beschleunigen. Denn während eine
Weiche ohne Endabschaltung für eine gesicherte Zeit unter Strom gesetzt
werden muss (hier etwa eine Sekunde), kann der Strom bei einer
endabgeschalteten Weiche abgeschaltet werden und der nächste Schaltvorgang
in Angriff genommen werden. Auch lässt sich so feststellen, ob überhaupt ein
Schaltvorgang nötig ist. Zeigt eine Weiche auf den linken Abzweig, muss ein
Auftrag, die Weiche nach links zu schalten nicht mehr durchgeführt werden.
Ähnlich einfach, wie die Entwicklung der Lichtsignal-Module gestaltete sich
heute der Prototyp für die Weichenschaltung. Nachdem auf dem Steckbrett eine
funktionierende Schaltung zusammengesteckt war, wurde ein Prototyp gelötet.
Einige Anpassungen in der CAN-Knoten-Firmware waren notwendig, damit die
Weichen oder Signale geschaltet werden können. Typische Modellweichen werden über
Magnetspulen angetrieben. Diese haben heutzutage eine Endabschaltung, um das
Durchbrennen der Magnetspulen durch Fehlbedienung zu verhindern. Diese
Endabschaltung lässt sich dazu ausnutzen, um die Lage der Weiche
festzustellen. So lassen sich manuelle Schaltvorgänge feststellen und es
lässt sich ein automatischer Schaltvorgang beschleunigen. Denn während eine
Weiche ohne Endabschaltung für eine gesicherte Zeit unter Strom gesetzt
werden muss (hier etwa eine Sekunde), kann der Strom bei einer
endabgeschalteten Weiche abgeschaltet werden und der nächste Schaltvorgang
in Angriff genommen werden. Auch lässt sich so feststellen, ob überhaupt ein
Schaltvorgang nötig ist. Zeigt eine Weiche auf den linken Abzweig, muss ein
Auftrag, die Weiche nach links zu schalten nicht mehr durchgeführt werden.
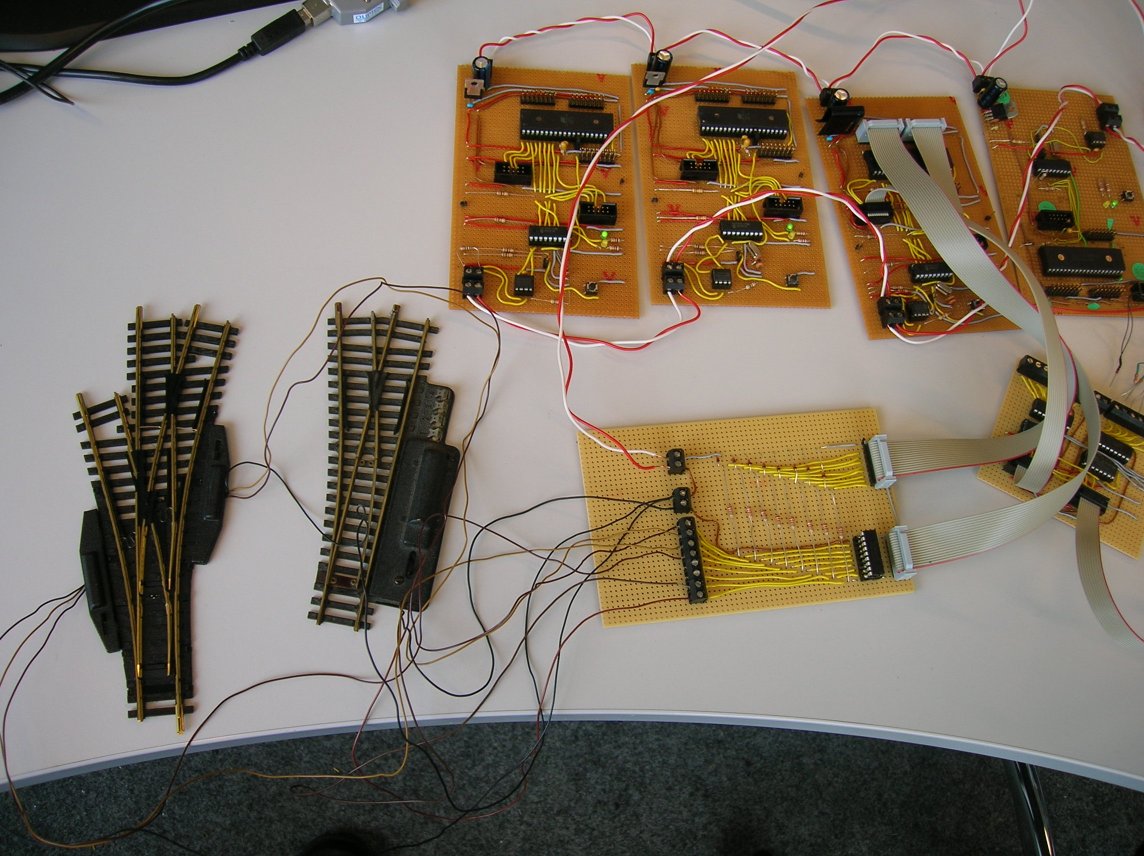
Prototypen für Lichtsignal-Module fertiggestellt
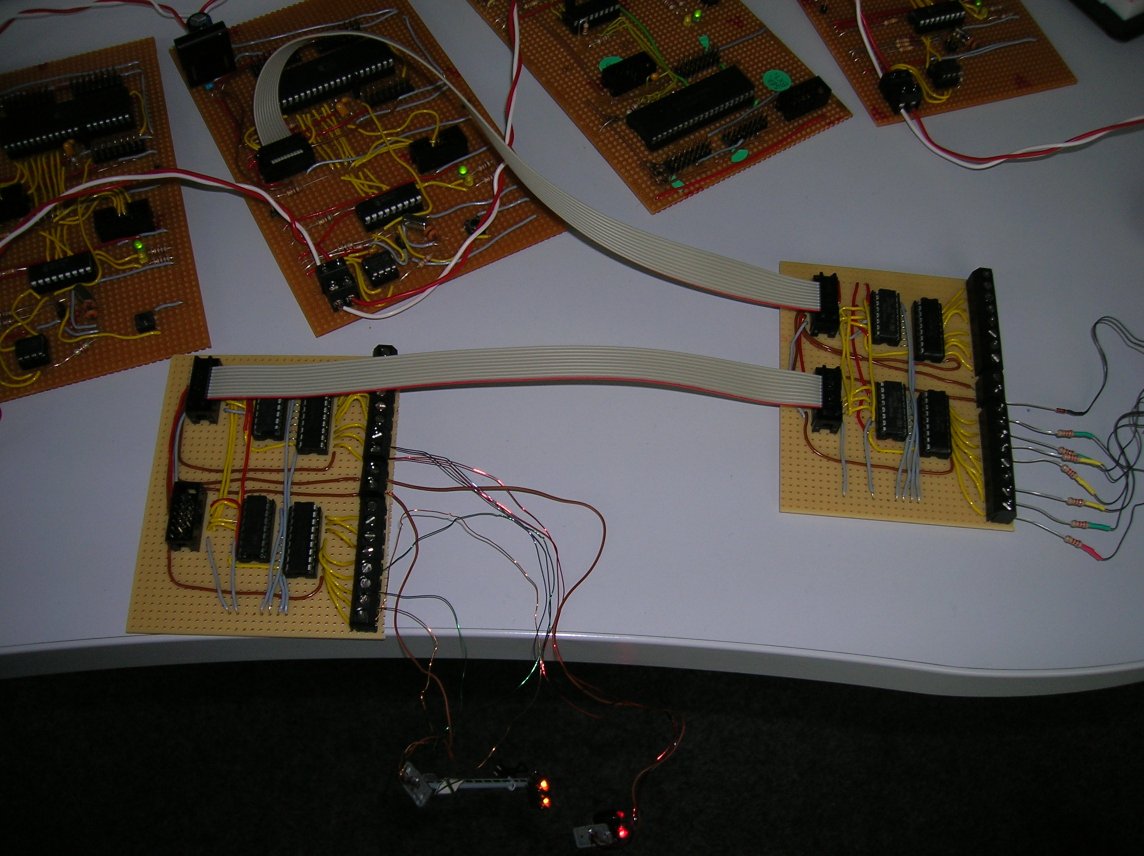 Heute wurden die Prototypen für die Module der Lichtsignale fertig gelötet.
Die Module werden über ein 10-poliges Kabel kaskadiert mit einem
Mikrocontroller verbunden. Darüber laufen Spannungsversorgung und die
Datenleitung. Auf den Modulen sind Schieberegister (74HC595) samt Leistungstreiber
(ULN 2803) für die Lichtsignale vorhanden. Es können bis zu vier Module
kaskadiert werden. Die Controller sind in der Lage, die korrekten
Signalbilder der Deutschen Bahn anzuzeigen. Es wird also nur das Kommando
gegeben, dass z.B. das Signal P3 auf Hp2 geschaltet
werden soll. Es werden Vorsignale, Blocksignale, Einfahrsignale,
Ausfahrsignale und Gleissperrsignale auseinandergehelten. Dabei könnten in
Zukunft noch weitere Signale - wie z.B. die neuen Ks-Signale - der Controller-Firmware
hinzugefügt werden, denn es ist ein In-System-Programming der Firmware über
CAN-Bus möglich.
Heute wurden die Prototypen für die Module der Lichtsignale fertig gelötet.
Die Module werden über ein 10-poliges Kabel kaskadiert mit einem
Mikrocontroller verbunden. Darüber laufen Spannungsversorgung und die
Datenleitung. Auf den Modulen sind Schieberegister (74HC595) samt Leistungstreiber
(ULN 2803) für die Lichtsignale vorhanden. Es können bis zu vier Module
kaskadiert werden. Die Controller sind in der Lage, die korrekten
Signalbilder der Deutschen Bahn anzuzeigen. Es wird also nur das Kommando
gegeben, dass z.B. das Signal P3 auf Hp2 geschaltet
werden soll. Es werden Vorsignale, Blocksignale, Einfahrsignale,
Ausfahrsignale und Gleissperrsignale auseinandergehelten. Dabei könnten in
Zukunft noch weitere Signale - wie z.B. die neuen Ks-Signale - der Controller-Firmware
hinzugefügt werden, denn es ist ein In-System-Programming der Firmware über
CAN-Bus möglich.
Schaltung für Steuerung über CAN-Bus steht
Seit letztem Donnerstag entwickeln mein Kollege Marc Habiger und ich die
Stellwerkssteuerung für die Modellbahn.
 Heute haben wir den
CAN-Protokollumfang in den Griff bekommen. Dazu zählt natürlich der
Austausch von CAN-Frames, sowie die vernünftige Filterung der Frames
am Controller. Dadurch können gleich die unwichtigen Pakete rausgefiltert
werden, ohne dass der Mikrocontroller mit Rechenzeit belastet wird. Auch das
Versenden von Standard Data Frames sowie Extended Data Frames funktioniert
problemlos.
Heute haben wir den
CAN-Protokollumfang in den Griff bekommen. Dazu zählt natürlich der
Austausch von CAN-Frames, sowie die vernünftige Filterung der Frames
am Controller. Dadurch können gleich die unwichtigen Pakete rausgefiltert
werden, ohne dass der Mikrocontroller mit Rechenzeit belastet wird. Auch das
Versenden von Standard Data Frames sowie Extended Data Frames funktioniert
problemlos.
Derzeit arbeiten wir an der Kopplung der Kommunikation mit dem PC. Diese soll über die schon altbackene RS232-Schnittstelle geschehen. Diese hat aber bis heute jeder PC und somit muss keine neue Steckkarte oder andere Erweiterung für den PC gekauft werden. Ein CAN-RS232-Gateway setzt die CAN-Frames vom PC über RS232-Schnittstelle auf den CAN-Bus um.
Ich werde häufig gefragt, warum das Ganze über CAN-Bus läuft. Schließlich gibt es genug ausgereifte Digitalmodule für die Modellbahn. Es ist so, dass der CAN-Bus viele gute Eigenschaften hat. Der CAN-Bus wurde von Bosch für den Automotive-Umfeld entwickelt. Ziel war es, durch Einsparung von Verkabelung Aufwand und Gewicht einzusparen. Inzwischen sind 20 Jahre vergangen und der CAN-Bus steckt in nahezu jedem Neuwagen. Die mechanische Belastung auch im Auto sind teilweise enorm, so dass mit dem CAN-Bus ein robuster 2-Draht-Bus (mit der Karosserie als Masse) geschaffen wurde. Bei der Modellbahn sind einige dieser Aspekte auch von Bedeutung. Ziel ist es, Verkabelung einzusparen. Nicht aus Gewichtsgründen, sondern aus rein ergonomischen Gründen, da die Drähte über Kopf montiert werden müssen. Auch die Robustheit spielt dabei eine Rolle. Es gibt auch auf einer Modellbahn viele Störeinflüsse gerade durch Antriebsspulen.
Zum guten Schluss zählt doch eins: Man hat etwas eigenes entwickelt um es zu verstehen. Obendrein ist es auch erheblich kostengünstiger, als die käuflich zu erwerbenden Digitalmodule. Letztlich ist es einfach nur cool, wenn man der Modellbahnanlage ein Firmware-Update spendiert ;-)