-
 Startseite
Startseite
-
 Projekt-Wiki
Projekt-Wiki
-
Projekt
-
Next Gen.
-
 YouTube
YouTube
-
 Java API-Doc
Java API-Doc
-
 C++ API-Doc
C++ API-Doc
-
 Steffen A. Mork
Steffen A. Mork
-
MORKNet-Blog
-
Impressum
-
Datenschutz
Alle Einträge
Schlagwörter:
Schaltung für Steuerung über CAN-Bus steht
Seit letztem Donnerstag entwickeln mein Kollege Marc Habiger und ich die
Stellwerkssteuerung für die Modellbahn.
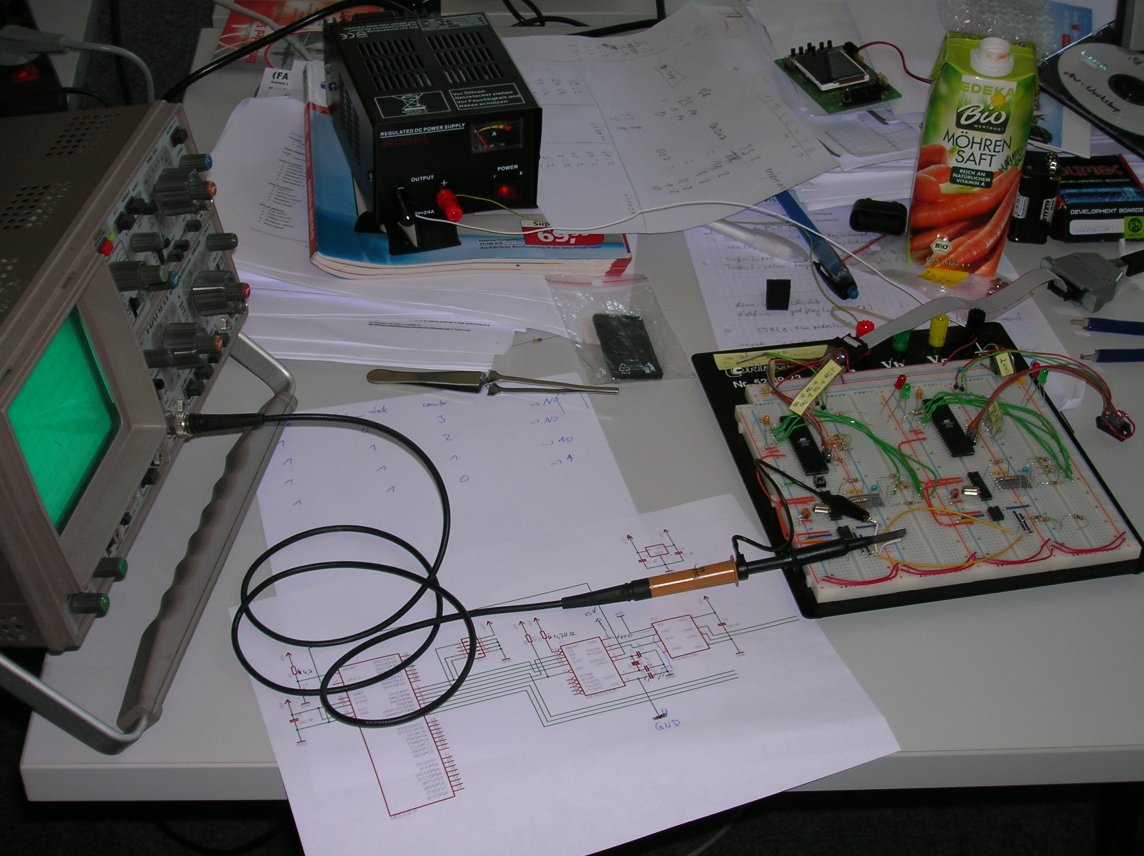 Heute haben wir den
CAN-Protokollumfang in den Griff bekommen. Dazu zählt natürlich der
Austausch von CAN-Frames, sowie die vernünftige Filterung der Frames
am Controller. Dadurch können gleich die unwichtigen Pakete rausgefiltert
werden, ohne dass der Mikrocontroller mit Rechenzeit belastet wird. Auch das
Versenden von Standard Data Frames sowie Extended Data Frames funktioniert
problemlos.
Heute haben wir den
CAN-Protokollumfang in den Griff bekommen. Dazu zählt natürlich der
Austausch von CAN-Frames, sowie die vernünftige Filterung der Frames
am Controller. Dadurch können gleich die unwichtigen Pakete rausgefiltert
werden, ohne dass der Mikrocontroller mit Rechenzeit belastet wird. Auch das
Versenden von Standard Data Frames sowie Extended Data Frames funktioniert
problemlos.
Derzeit arbeiten wir an der Kopplung der Kommunikation mit dem PC. Diese soll über die schon altbackene RS232-Schnittstelle geschehen. Diese hat aber bis heute jeder PC und somit muss keine neue Steckkarte oder andere Erweiterung für den PC gekauft werden. Ein CAN-RS232-Gateway setzt die CAN-Frames vom PC über RS232-Schnittstelle auf den CAN-Bus um.
Ich werde häufig gefragt, warum das Ganze über CAN-Bus läuft. Schließlich gibt es genug ausgereifte Digitalmodule für die Modellbahn. Es ist so, dass der CAN-Bus viele gute Eigenschaften hat. Der CAN-Bus wurde von Bosch für den Automotive-Umfeld entwickelt. Ziel war es, durch Einsparung von Verkabelung Aufwand und Gewicht einzusparen. Inzwischen sind 20 Jahre vergangen und der CAN-Bus steckt in nahezu jedem Neuwagen. Die mechanische Belastung auch im Auto sind teilweise enorm, so dass mit dem CAN-Bus ein robuster 2-Draht-Bus (mit der Karosserie als Masse) geschaffen wurde. Bei der Modellbahn sind einige dieser Aspekte auch von Bedeutung. Ziel ist es, Verkabelung einzusparen. Nicht aus Gewichtsgründen, sondern aus rein ergonomischen Gründen, da die Drähte über Kopf montiert werden müssen. Auch die Robustheit spielt dabei eine Rolle. Es gibt auch auf einer Modellbahn viele Störeinflüsse gerade durch Antriebsspulen.
Zum guten Schluss zählt doch eins: Man hat etwas eigenes entwickelt um es zu verstehen. Obendrein ist es auch erheblich kostengünstiger, als die käuflich zu erwerbenden Digitalmodule. Letztlich ist es einfach nur cool, wenn man der Modellbahnanlage ein Firmware-Update spendiert ;-)